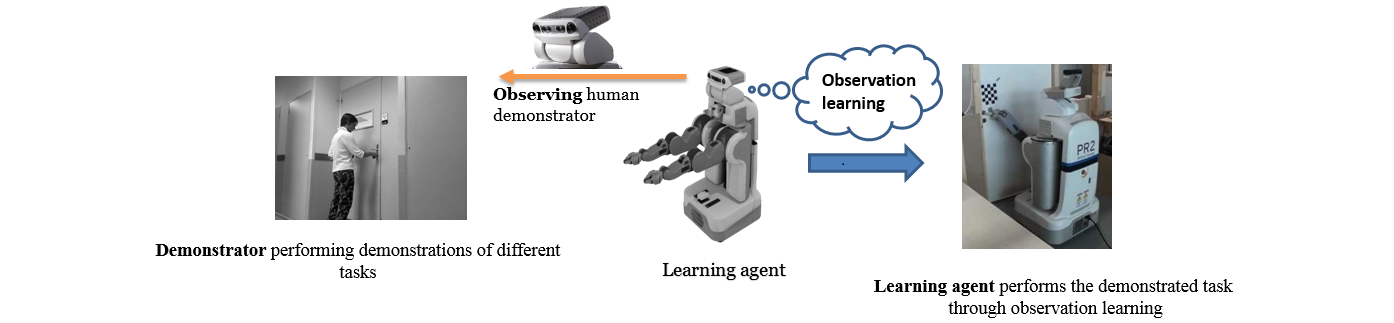
Seeing to learn (S2l) project aims to develop observational learning approaches for robotic systems. It addresses the inability of current systems to learn new tasks solely from third person demonstrations, directly or from online videos. The project envisions a future, where robots equipped with observational learning can aquire new skills and abilities like human beings from demonstrations.

PhD Student | Visual AI
Univeristy of Leeds

Artificial Intelligence
Univeristy of Leeds

Infrastructure Engineering
Univeristy of Leeds